Three-dimensional flight-path planning for unmanned aerial vehicles (UAVs) inherently involves multiple, often conflicting objectives’minimizing route length and energy consumption, maximizing safety by avoiding no-fly zones and high-turbulence regions, and ensuring smooth maneuverability within kinematic limits. This study presents an enhanced adaptation of the Task Allocation and Archive-Guided Mutation Particle Swarm Optimization (TAMOPSO) algorithm to address these challenges. In the proposed framework, each candidate path is encoded as a sequence of discrete 3D waypoints, while dynamic task allocation partitions the swarm into role-specific subpopulations: global explorers for broad route discovery, local refiners for obstacle-proximal optimization, and altitude managers for vertical profile adjustment. An external archive of nondominated solutions, maintained through a uniform contribution index, preserves Pareto-front diversity and guides adaptive L’vy-flight mutations that balance global exploration with local refinement according to the swarm’s convergence state. The algorithm’s effectiveness is evaluated across benchmark terrains of varying complexity, including scenarios with seven and ten peaks, obstacle clusters, and restricted airspace constraints. Comparative results against fourteen baseline algorithms demonstrate that TAMOPSO achieves up to 60% reduction in total flight distance, and 47% faster convergence on average, while producing smoother trajectories and more uniformly distributed Pareto fronts. Extensive loop-based Monte Carlo experiments were implemented in the MATLAB environment, confirming the statistical robustness, computational efficiency, and scalability of the proposed approach. Overall, the integration of role-based task allocation and archive-driven adaptive mutation establishes TAMOPSO as a powerful and versatile framework for intelligent, real-time UAV path optimization in complex 3D mission environments.
The authors wish to express their sincere gratitude to the University of Tabriz. We also acknowledge the valuable feedback provided by peer reviewers and colleagues during the design and evaluation of the algorithm.
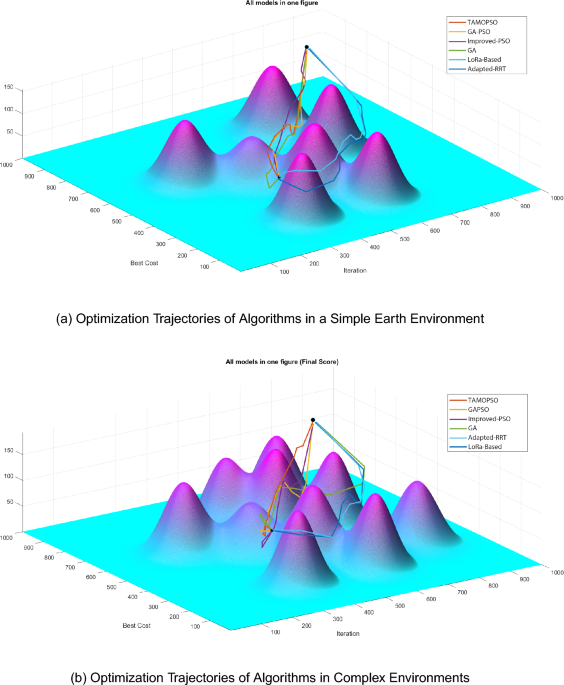
Figure 17 below illustrates the Performance Evaluation of TAMOPSO and Benchmark Algorithms Under Different Terrain Conditions, where subfigure (a) represents the optimization behavior in a Simple Earth environment and subfigure (b) depicts performance across Complex environments.
In Fig. 17 (a), the 3D surface plot visualizes the optimization progress of six algorithms’TAMOPSO, GA-PSO, Improved-PSO, GA, LoRa-Based, and Adapted-RRT’within a Simple Earth environment. The axes represent the Best Cost (performance metric) and Iteration (optimization steps), while the surface contours illustrate the underlying search landscape. Each trajectory traces how a given algorithm explores and converges toward the optimal solution. TAMOPSO demonstrates a smoother and more direct path toward the global optimum, highlighting its superior convergence efficiency and stability in relatively uncomplicated terrains. In contrast, other algorithms show more oscillatory or indirect movements, indicating less effective exploration-exploitation balance. Overall, the figure emphasizes TAMOPSO’s robustness and adaptability in achieving optimal solutions with reduced computational effort under simple environmental conditions.
In Fig. 17 (b), the 3D surface plot illustrates the optimization performance of several algorithms’TAMOPSO, GAPSO, Improved-PSO, GA, Adapted-RRT, and LoRa-Based’when applied to Complex environments. The axes represent Best Cost and Iteration, while the rugged surface models a challenging optimization landscape characterized by multiple local optima. Compared to the smoother Simple Earth environment, these complex landscapes introduce higher variability and convergence difficulty. The plotted trajectories reveal how different algorithms navigate the intricate terrain, with some exhibiting premature convergence or oscillatory movements. TAMOPSO maintains relatively stable and consistent progress toward the global optimum, showcasing superior adaptability and robustness in overcoming local minima. This behavior highlights TAMOPSO’s effectiveness in balancing exploration and exploitation, making it particularly suitable for optimization in high-complexity or dynamically changing environments.
The alternative text for this image may have been generated using AI.Full size imagePerformance Evaluation of TAMOPSO and Benchmark Algorithms Under Different Terrain Conditions. (a) Simple Earth environment, and (b) Complex environments.